The class

To learn about design for manufacturing and iterative design, the Mechanical Prototyping class at Olin builds underactuated hands - mechanical hands that are capable of adjusting to the object they are grasping. You can learn more about the full class at the class’ website.
I was on a team with three other students - Brendan Quinlivan, Janaki Perera, and Jeffrey Holzgrafe. Together we were Team Wonk because our initial design was a little “Wonky”. You can read our full report on our project’s page.
Iterations
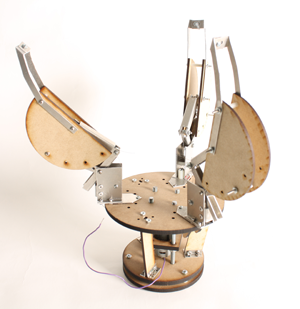
Our team made a sketch model (made of cardboard and string), two prototypes (one of MDF and sheet metal, and one that was 3D printed with poured polymer finger tips), and a final design (with a mixture of MDF and 3D print with a springsteel finger nail).


Design
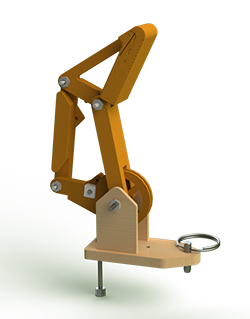
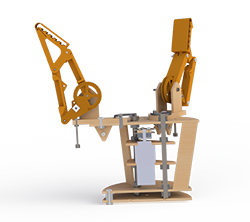
We modeled our design after the four bar linkage work of Laliberte, Birglen, and Gosselin at Laval University, but with a few additions.
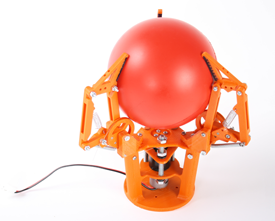
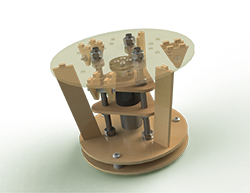
Because we needed to grip many types of objects of different form factors, we made the fingers rotate to form three different grasping positions - a spherical rotationally-symmetric grip, a parallel opposed grip for cylindrical shapes, and a precision pinching grip. This allowed us to use the same mechanism to pick up a basketball, barbell, and key.
We experimented with having adjustable finger tip angles to better account for different size objects, but we found that a single finger tip angle was optimal for our design. In the end it was useful to have experimented with this feature because it allowed us to understand which finger tip angle was best.
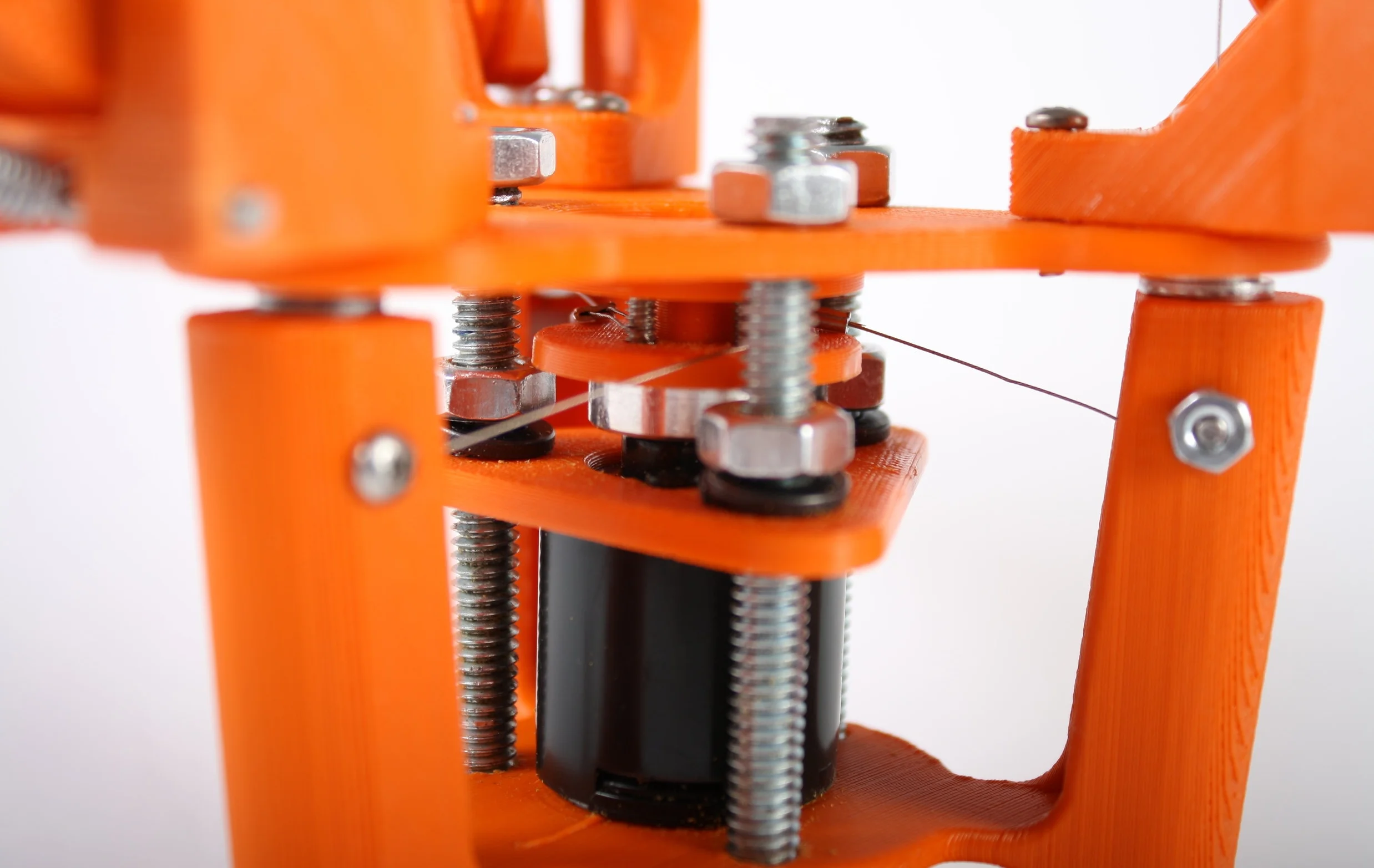
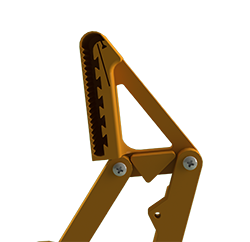
Our most unique innovation was the fingernail. We wanted a rounded rubber fingertip to improve grasping of the larger spheres, but this made it very difficult to pick up the smaller objects like a ball bearing, grain of rice, or a key. By adding the pliant but precise fingernails, we were able to pick up these tiny objects while retaining our softer rounded fingertips.
Results
At the end of the class, the team competed based on the size, mass, dexterity, and aesthetic appeal of our hands.
We won the dexterity and size categories, tied the weight category, and came in first overall. We were able to grasp, raise, twist, and replace… a 5/16” ball bearing, a basketball, a key, a grain of rice, an ice cube, a paperback book, a 5 pound dumbbell and an easter egg.


