Jimmy is the brainchild of Futurist Brian David Johnson as part of his 21st Century Robot campaign with Intel. Brian's vision for Intel's new Edison technology was that it would begin a new era where, instead of a smartphone, people have robotic companions.
Brian approached the Olin Mechanical Prototyping class to explore how his fiction could become a reality - how a child-sized bipedal robot could be completely customizable, open source, and could be built by makers for less than $500.
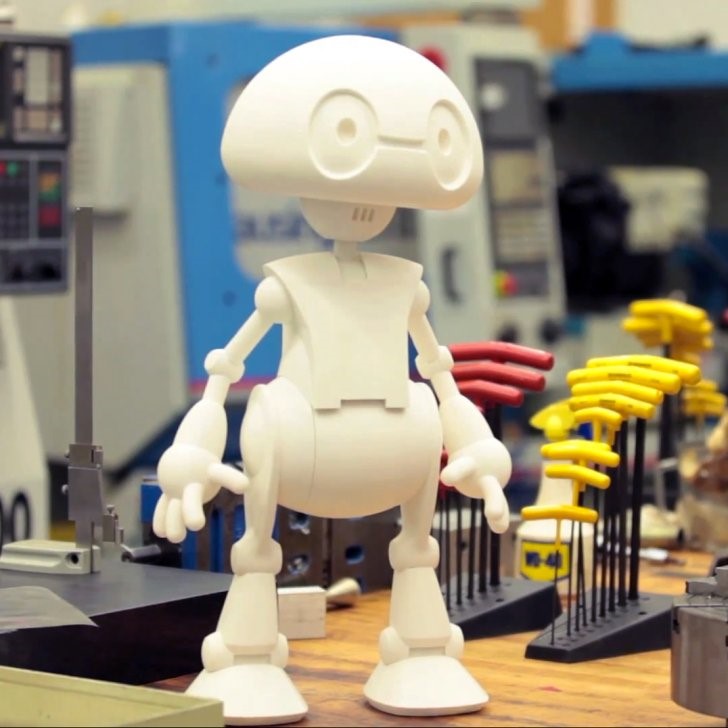
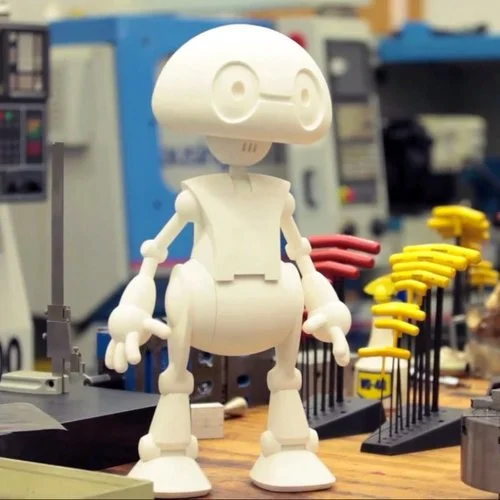
3D printed model of Jimmy's concept art

Artist's rendering of Jimmy emoting
In this class, I worked with a team of my peers to design a mid-range version of jimmy. This version had enough actuators to walk and emote while still meeting the size and price caps. This version of Jimmy had to be less than 30" tall with 4-8 motors while being a static walker (shuffle style walking, maintaining center of gravity over the contact with the floor) and having emotive arm and head movements.
The design for our version of Jimmy had 10 degrees of freedom with 6 motors. His head turned from side to side, he could turn his elbows, lift his arms, swing his legs and arms, shift his weight, and turn. This allowed him to emote with his arms, direct the sensors located in his head, and walk.
My focus was on the hips and walking motion design. This was an interesting challenge because most human and robotic gaits depend on a bending knee. Because of our constraints, we could not afford to have a knee joint. Instead, we opted to have compliant ankles and a Joe Klann Mechanism of linkages to move the legs. This system of linkages translates a rotational motion into a curve at the end of the primary linkage that approximates a human gait.